This is the third chapter of a tutorial for building an AI agent for the racing game TORCS. In this chapter, we will learn to break, change gears and drive faster.
Accelerating the right way
Maybe you are expecting that because we will learn to brake, we can set the
accelerator to 1.0 whenever we move forward right?! I am afraid we can't !
We cannot go full speed on every section of a track. If our car is on a straight
line then we can do whatever we want to the accelerator, meaning we can just
set it to 1.0 (Your dream is realized!). But on a turn section,
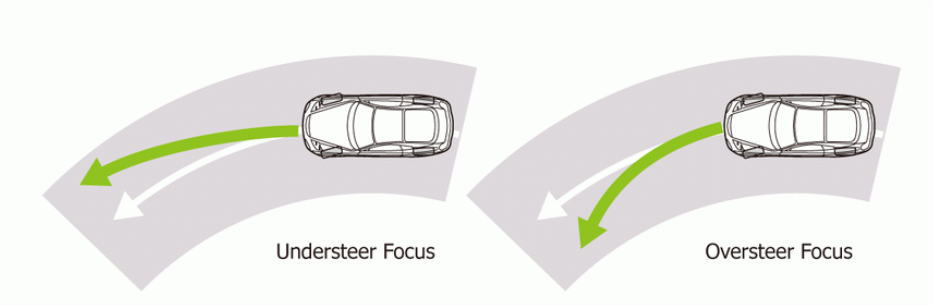
there is a limited amount of speed we have to respect. Otherwise, we migth
understeer and go off road.
Understeer?... Here is a quote from Wikipedia to the rescue.
Understeer and oversteer are vehicle dynamics terms used to describe the sensitivity of a vehicle to steering. Oversteer is what occurs when a car turns (steers) by more than the amount commanded by the driver. Conversely, understeer is what occurs when a car steers less than the amount commanded by the driver.
So we need to know what amount of speed we can apply to safely pass a turn.
We will resort to an equation from physics. Stay with me.
Where:
- \(m\) : is the current car mass (kg)
- \(v\) : current speed (m/s)
- \(r\) : radius of the turn's segment(m)
- \(\mu\) : friction coefficient
- \(g\) : the gravity of earth 9.80665 (m/s^2)
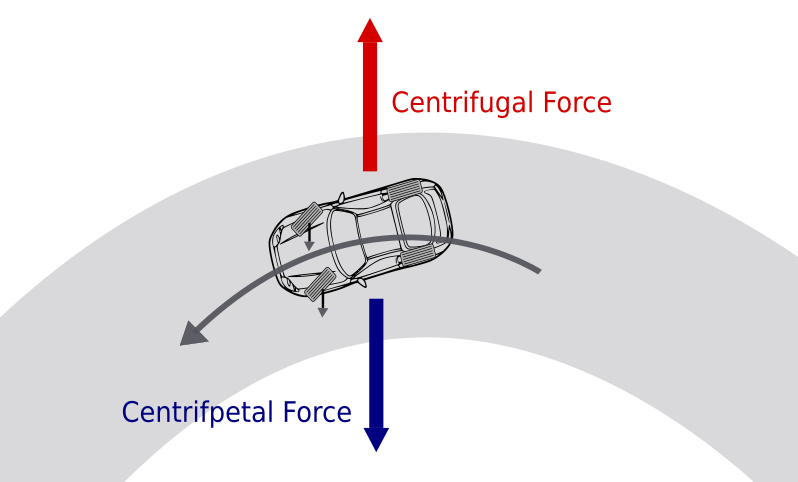
The left part of the equation is the centrifugal force and the left side is the centripetal force created by the friction of the turning wheels of our car. Here is a quote from an article that explain those two forces.
Centrifugal force (Latin for "center fleeing") describes the tendency of an object following a curved path to fly outwards, away from the center of the curve. It's not really a force; it results from inertia — the tendency of an object to resist any change in its state of rest or motion. Centripetal force is a real force that counteracts the centrifugal force and prevents the object from "flying out," keeping it moving instead with a uniform speed along a circular path.
Let's picture what we are talking about.
We find the appropriate speed by expressing \(v\) from the equation above, which yield:
This is a simplified version of the real appropriate speed value. We assume that
all wheels have the same \(\mu\), and the weight is equally distributed over all
wheels. The coefficient \(\mu\) with the friction coefficient which normally is
a function with many parameters includind the relative speed vector between the
surfaces, the current load, the shape of the patch, the temperature, etc.
With our result, let's create a function that returns the appropriate (allowed)
speed on a segment of the track. We declare it in carcontroller.h within the
CarController class interface.
float CarController::GetAllowedSpeed(tTrackSeg* segment);
and define it in carcontroller.cpp.
/**
* Compute the allowed speed on a segment.
* */
float CarController::GetAllowedSpeed(tTrackSeg* segment)
{
if (segment->type == TR_STR){
return FLT_MAX; // Max float number
} else {
float mu = segment->surface->kFriction;
float r = segment->radius;
return sqrt(mu * G * r);
}
}
TR_STR is a straight segment, there is also TR_RGT for a right curve and
TR_LFT for a left curve, from track.h.
To prevent the car from going over the allowed speed of a given segment, we need to know how much throttle to apply on the acceleretor pedal. In TORCS the acceleration throttle value is between 0 and 1, and can be deduced by normalizing the car engine's given revolution per minute (rpm) by its rpm redline i.e the maximum revolution per minute the car's engine can operate at.
If we also express the angular speed of the wheel \(\omega = \theta / t\) with the linear speed \(v = \omega \times \theta\) we have \(\omega = v / r\) Since the angular speed is also equal to the rpm divided by the gear ratio, we have the following relation:
Where
- \(v\) is the speed of the car (m/s)
- \(r\) is the radius of the spinning wheel (m)
- \(rpm\) ie the engine's revolution per minute (rad/s)
- \(gear\ ratio\) the ratio of the angular velocity fo input gear (engine's rpm) and the angular velocity output gear (the wheel).
We obtain the desired accelerator throttle by plugin the expression of \(rpm\) into the one of the \(accelerator\ throttle\).
We rewrite the GetAcceleration() method with the result. It basically says
if with our current speed we can accelerate to the max without stepping over
the allowed speed of the segment, we go full throttle. Else, we compute the
right amount of of throttle to apply on the accelerator pedal.
float CarController::GetAcceleration()
{
float acceleration = 0.0;
float allowed_speed = GetAllowedSpeed(car->_trkPos.seg);
if (allowed_speed > car->_speed_x + ACCELERATION_MARGIN){
acceleration = 1.0;
} else {
float gear_ratio = car->_gearRatio[car->_gear + car->_gearOffset];
float rpm_redline = car->_enginerpmRedLine;
float wheel_radius = car->_wheelRadius(REAR_RGT);
acceleration = (allowed_speed * gear_ratio / wheel_radius) / rpm_redline;
}
return acceleration;
}
We finish this part by defining the constants G (gravity) and FULL_THROTTLE in carcontroller.cpp.
const float CarController::G = 9.81; // [m/s^2]
const float CarController::ACCELERATION_MARGIN = 1.0; // [m/s]
and we define them in carcontroller.h among the public element of the
CarController class.
static const float G;
static const float ACCELERATION_MARGIN;
Braking Basics
Checking the distance
As we previously saw, there is a speed limitation for turn segments. If we approach a turn segment at a speed higher than the allowed speed of that turn segment, we need to reduce our speed to the given allowed speed, before engaging that turn segment. For that, we need to brake.
We need to know in advance when to apply the brakes. i.e. at what distance from the turn we have to start braking. We can compute the braking distance using the following equation of energies.
Where
- \(m\) is the mass of the car (kg)
- \(v_1\) is the current speed of the car (m/s)
- \(v_2\) is the allowed speed on the turn segment, or targeted portion of the track (m/s)
- \(g\) is the gravity constant
- \(\mu\) is the friction coefficient
- \(s\) is the distance necessary to brake (m)
We have
We also need a mechanism to gradually look ahead from the current position of the car to a potential segment with an allowed speed lower than the current speed of the car, up to a given distance. The lookahead mechanism will start with the distance from the car to the end of the current segment. Let's implement a utility function to get this initial distance.
in carcontroller.cpp add
/**
* Measure the distance from the current position of the car
* to the end of the segment the car is on.
*/
float CarController::DistanceFromCarToSegmentEnd()
{
auto car_position = car->_trkPos;
auto segment = car_position.seg;
if (segment->type == TR_STR){
return segment->length - car_position.toStart;
} else {
return (segment->arc - car_position.toStart) * segment->radius;
}
}
As you might see, if the segement is a straight, we simply do a substraction else the arc of the radius comes into play.
Note that the maximum distance up to which we check for a turn to slow down is a special case of the distance formula \(s\) where \(v_2 = 0\). Meaning in case we have to completely stop the car. This yield \(s = v_1^2 / (2 \cdot g \cdot \mu)\)
The illustration below gives an idea of the 'look ahead' mechanism.
Braking
We will now implement our breaking mechanism. In case we are on a segment with a speed higher than the allowed speed on that segment, we brake. Otherwise we first consider a maximum distance up to which we check for turns that requires to decrease our speed. Then we gradually 'look ahead' up to that maximum distance for potential turns for which we need to slow down. If we find one, we check if the required distance we need to brake to match the allowed speed of that turn is greater than the distance we currently are (looking ahead) to that turn. If so we apply the brake. For every other conditions, we do not brake.
Here is the implementation of basic braking in carcontroller.cpp
float CarController::GetBrake()
{
float brake = 0.0;
tTrackSeg* segment = car->_trkPos.seg;
float speed = car->_speed_x;
float allowed_speed = GetAllowedSpeed(segment);
float mu = segment->surface->kFriction;
float look_ahead_distance_max = pow(speed, 2) / (2.0 * mu * G);
float look_ahead_distance = DistanceFromCarToSegmentEnd();
if (allowed_speed < speed) {
brake = 1.0;
}
segment = segment->next;
while(look_ahead_distance < look_ahead_distance_max){
allowed_speed = GetAllowedSpeed(segment);
if (allowed_speed < speed) {
float brake_distance =
(pow(speed, 2) - pow(allowed_speed, 2)) / (2.0 * mu * G);
if (brake_distance > look_ahead_distance){
brake = 1.0;
break;
}
}
look_ahead_distance += segment->length;
segment = segment->next;
}
return brake;
}
Updating related methods
Let's make an update in the Drive method such that we accelerate only if we
are not braking.
void CarController::Drive(tSituation* situation)
{
memset((void *)&car->ctrl, 0, sizeof(tCarCtrl)); // reset the values
float car_angle = CurrentCarAngle(situation);
car->_steerCmd = GetSteering(car_angle);
car->_gearCmd = GetGear();
car->_brakeCmd = GetBrake();
if (car->_brakeCmd == 0.0){
car->_accelCmd = GetAcceleration();
} else {
car->_accelCmd = 0.0;
}
}
Let's fix the gear to 4, for a test drive.
float CarController::GetGear()
{
return 4;
}
Now let's declare the newly defined method within the class declaration in carcontroller.h.
float DistanceFromCarToSegmentEnd();
You can compile and do a test drive.
Shifting Gears
We will implement a simple yet efficient gear shifting mecanism.
For now we are only moving forward, so if we are in neutral or reverse, we shift to the 1st gear. Otherwise we compute the maximum speed allowed at the current gear we are at, by multiplying the angular speed of the engine by the wheel radius and a 'shift constant' which represent a percentage of the rpm red line. If the product is less than the car speed, we shift up. Else, we check if we can shift down by first ensuring we are at a gear higher than 1. We then compute the maximum speed allowed at the gear lower than the current one. If the maximum speed allowed at the lower gear is lower than our current speed, we down shift. Note that we added a shift margin to prevent oscillating the gear up and down.
Here is the code for the shifting mechanism, implemented in GetGear()
float CarController::GetGear()
{
if (car->_gear <= 0)
return 1.0;
float gear_ratio_up = car->_gearRatio[car->_gear + car->_gearOffset];
float omega = car->_enginerpmRedLine / gear_ratio_up;
float wheel_radius = car->_wheelRadius(REAR_RGT);
if (omega * wheel_radius * SHIFT < car->_speed_x){
return car->_gear + 1;
} else if (car->_gear > 1) {
float gear_ratio_down = car->_gearRatio[car->_gear + car->_gearOffset - 1];
omega = car->_enginerpmRedLine / gear_ratio_down;
if (omega * wheel_radius * SHIFT < car->_speed_x + SHIFT_MARGIN) {
return car->_gear - 1;
}
}
return car->_gear;
}
Let's define the new constants at the begining of carcontroller.cpp
const float CarController::SHIFT = 0.9; // [-] (% of rpm red line)
const float CarController::SHIFT_MARGIN = 4.0; // [m/s]
And declare them in carcontroller.h
static const float SHIFT;
static const float SHIFT_MARGIN;
Let's end the chapter with a test drive of the result.
Next we will take the aerodynamics into account.